Робот-голубь подсказал, как сконструировать самолет без хвостового киля
Исследователи из Гронингенского и Стэнфордского университетов создали роботизированную модель голубя. С ее помощью они выяснили, как птицы обходятся в полете без руля направления — такого важного аэродинамического органа управления самолетом.
У скользящих в небе птиц нет вертикального хвостового киля, но они сохраняют устойчивость при турбулентности, не нуждаясь в отдельных закрылках. Самолетам, напротив, необходимо вертикальное оперение для контроля курса и предотвращения крена в сторону при так называемом эффекте голландского шага. Эти колебания, схожие с движениями фигуристов, возникают, когда поперечная устойчивость воздушного судна велика по сравнению с путевой устойчивостью.
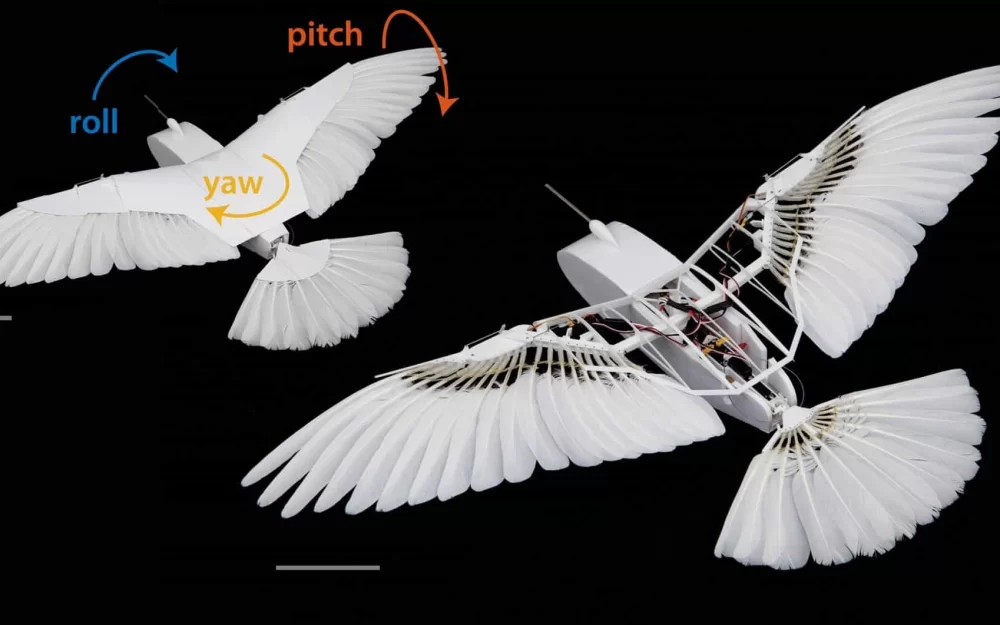
Если птицы обходятся без вертикального стабилизатора за счет непрерывных изменений формы своих крыльев и хвоста, то современные пилоты добиваются устойчивости по крену, тангажу (задирание/опускание носа) и рысканию благодаря рулям направления и элеронам крыла. Это три угла поворота, задающие ориентацию летательного аппарата относительно нормальной системы координат или его центра инерции по трем осям.
Тангаж, отметили исследователи, также можно стабилизировать с помощью стреловидности крыла самолета или загнутых аэродинамических профилей, поэтому от горизонтального оперения можно отказаться. Иное дело — оперение вертикальное, обеспечивающее «железной птице» путевую устойчивость, управляемость и балансировку относительно вертикальной оси.
Чтобы продемонстрировать, как пернатые непрерывно корректируют форму крыльев и хвоста, ученые разработали роботизированную модель PigeonBot II. Она состоит из биомиметического скелета и 52 (40 маховых и 12 хвостовых) настоящих голубиных перьев. Они образуют крылья и хвост, которые могут расправляться, подниматься и наклоняться из стороны в сторону. В конструкцию заложен алгоритм, имитирующий нервно-мышечные рефлексы, которые, как считается, птицы используют для стабилизации полета.
Общая масса модели составляет приблизительно 300 граммов, что сопоставимо с весом голубей. Конструкция включает также девять сервоприводов и два небольших пропеллера, установленных на каждом запястье, что позволяет роботу подниматься, кружить, опускаться и летать в различных позах.
Испытания ученые сначала провели в аэродинамической трубе (без пропеллеров), чтобы настроить установленный адаптивный рефлексивный контроллер. Это позволило роботу смягчить турбулентные возмущения и успешно пройти эксперимент на открытом воздухе.
Как считают исследователи, их работа поможет создать более экономную и легкую конструкцию самолета без вертикального стабилизатора. Кроме того, предложенное решение поможет снизить радиолокационную заметность реактивных истребителей, сделав их более эффективными.
Научная работа опубликована в журнале Science Robotics.












Написать комментарий