Будущее робототехники: революционный подход к обучению мягких роботов с помощью ML
Новый метод машинного обучения позволяет обучать мягких роботов, динамически изменяющих свою форму, и управлять ими для выполнения различных задач!
Исследователи из Массачусетского технологического института (MIT) делают прорыв в области робототехники, создавая роботов, способных как слизь, изменять свою форму для выполнения разнообразных задач – от банального преодоления препятствий до серьезных медицинских манипуляций (в перспективе!).
Обучение роботов, состоящих из множества мелких ”мышц”, традиционными методами невозможно, поэтому исследователи применили метод обучения с подкреплением, начиная с управления целыми “группами мышц”, постепенно уточняя контроль до уровня отдельного “кусочка” мышцы.
Использование модели машинного обучения, отображающей пространство действий робота как 2D-площадку с точками, похожими на пиксели, позволяет ему лучше понимать, как его движения влияют на окружающую среду. Это упрощает задачу обучения и увеличивает эффективность взаимодействия робота с окружением.
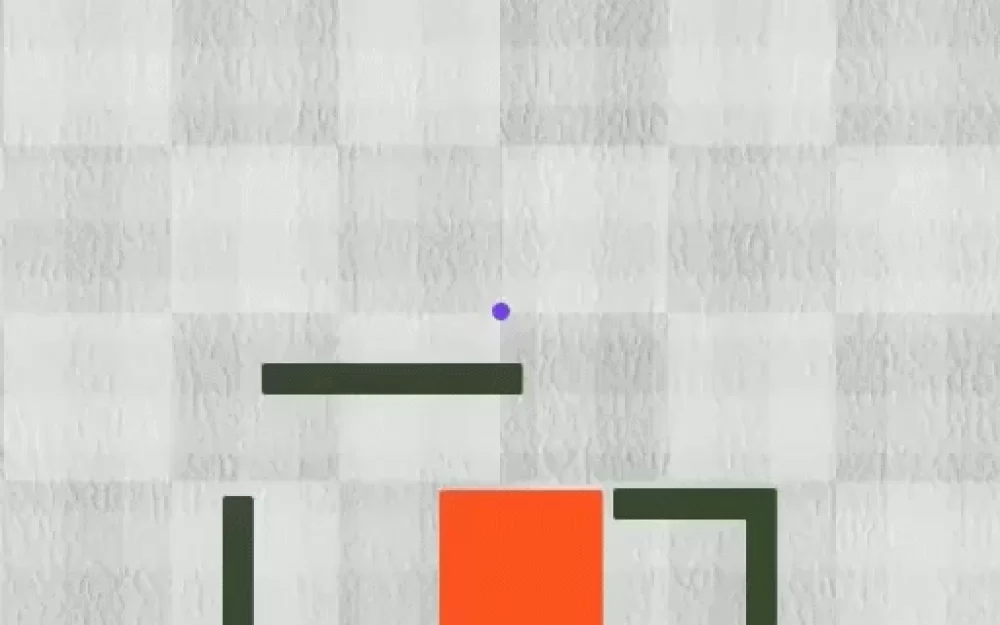
Для тестирования алгоритма исследователи разработали симулятор DittoGym, где задачи варьируются от навигации среди препятствий до имитации букв. Преимущества метода подтверждены успешным прохождением всех этих испытаний в симуляторе и способностью робота выполнять многоэтапные задачи, что стало возможным благодаря наличию сильной корреляции между близлежащими точками действия.
Результаты этих экспериментов показывают большой потенциал мягких роботов и влияют на развитие будущих систем управления в робототехнике. Представление этих научных достижений на международной конференции вселяет уверенность в то, что в отдаленном будущем мягкие роботы смогут адаптироваться к самым разным условиям и задачам, став неотъемлемой частью нашей жизни.
Обязательно ознакомьтесь с видео! :)
https://youtu.be/IieJM8wYUKo
Новость взята из источника: https://news.mit.edu/2024/better-way-control-shape-shifting-soft-robots-0510













Написать комментарий