
Энтузиаст представил проект ходячего стола
Энтузиаст поделился проектом деревянного ходячего стола Carpentopod, который способен приносить вещи хозяину.
Разработчик написал программу, которая отбирала варианты ножек на основе скорости ходьбы, клиренса и использованного материала. Дополнительные баллы получали те варианты, которые обеспечивали более плавные движения.
Затем программа отбирала параметры лучших вариантов для создания следующего поколения ножек. Симуляция была написана на C++, она могла отбирать десятки поколений в секунду.
Видео показывает этот процесс в течение 20 секунд:
Каждый кадр демонстрирует более продвинутый вариант ножки, созданный из 5000 вариаций.
Сцепление ножек также было выбрано путем запуска более крупной и длинной версии этой симуляции. Оно получило дополнительную точку сочленения. Кончики ножек было решено сделать закруглёнными, чтобы минимизировать скольжение и другие неприятные эффекты.
Сначала энтузиаст создал крошечную модель более ранней версии, а затем решил опробовать систему ножек с деревянным журнальным столиком.
Поскольку каждая нога в соединении Carpentopod обеспечивает всего треть цикла ходьбы, то столу потребовалось 12 ножек для устойчивости. Компоненты были изготовлены из листов ламинированного бамбука с помощью Autodesk Fusion 360.
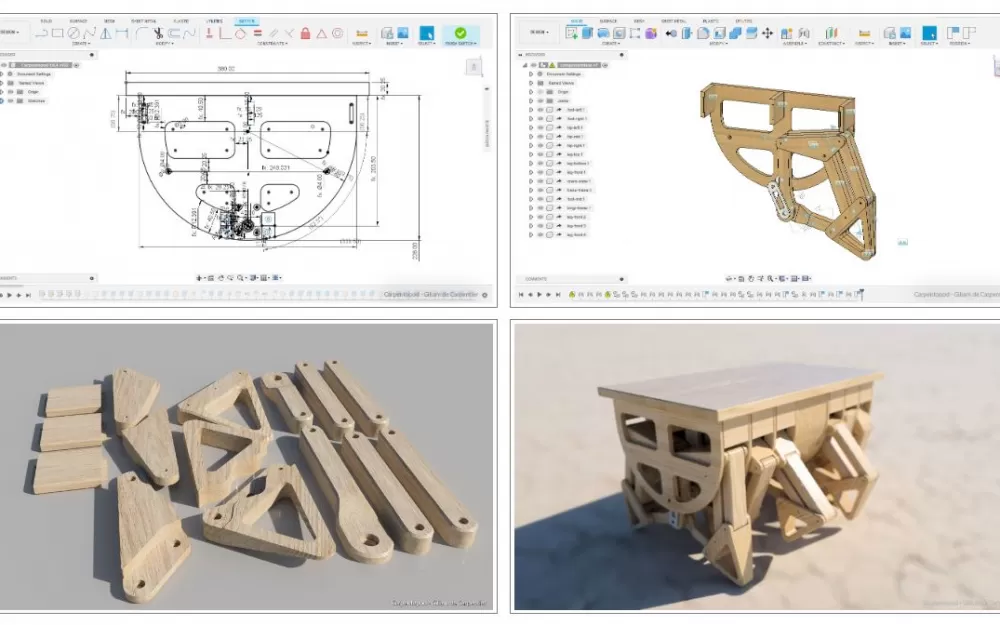
Между шестью ногами на одном конце и шестью на другом было предусмотрено место для полого центрального «брюшка», чтобы вместить электронику, двигатели и аккумулятор.
Каждая группа из шести ног соединена с собственным коленчатым валом, приводимым в движение одним двигателем. Таким образом, всего понадобилось два отдельно управляемых двигателя, чтобы водить и поворачивать стол.
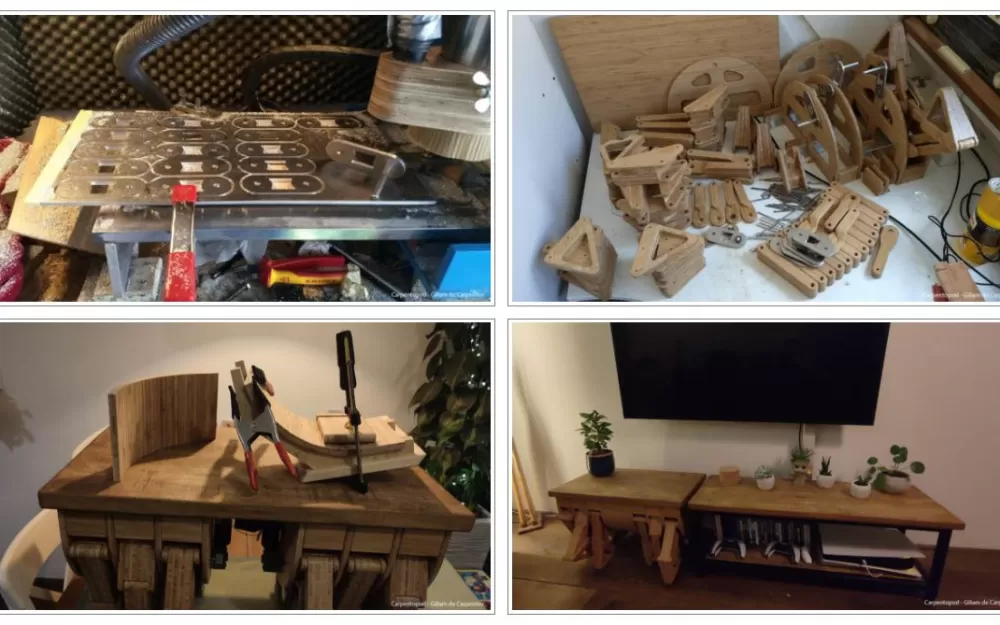
Энтузиаст использовал для изготовления ножек недорогой 3-осевой фрезерный станок с ЧПУ. Более мелкие детали из листов ламинированного бамбука изготовлялись по отдельности, а затем скреплялись вместе. Изогнутые «дверцы» «брюшка» стола были сделаны путём тонкой «прорезки» того же ламинированного бамбука, который пропаривали и потом высушивали в изогнутом кондукторе, чтобы придать новую форму. Затем дверцы закрепили поверх двух невидимых шарнирных рёбер со встроенными магнитами.
Обе шестиногие секции должны приводиться в движение собственным двигателем. Но именно один коленчатый вал каждой секции координирует относительное движение ножек. Это можно увидеть на видео, где энтузиаст толкает вперёд секцию без мотора, и она ведёт себя как колесо:
Чтобы заставить секции двигаться самостоятельно, разработчик заказал два дешёвых редукторных 24-вольтовых бесщёточных двигателя, которые обычно встраивают в жалюзи. Эти двигатели выдавают максимум 1,5 Нм при 130 об/мин. Их встроенная электроника также позволяет обеспечить прямое управление скоростью с помощью дополнительного сигнального провода ШИМ. Чтобы автоматически управлять напряжением двигателя, энтузиаст купил два дешёвых модуля Step Up/Down Converter, чтобы преобразовывать практически любое напряжение батареи в любое значение от 0 до 24 В. Выходное напряжение модулей было решено напрямую устанавливать с помощью быстрого сигнала ШИМ с переделанной платы микропроцессора Arduino Nano. Модули преобразователя напряжения также предлагали настраиваемую настройку максимального тока, что дало контроль над максимальным крутящим моментом при остановке для каждого двигателя.
Затем разработчик написал программное обеспечение на C для создания замкнутого контура управления двигателем. Он подключил модуль Bluetooth к Arduino и добавил код, который позволяет подключаться к электронной начинке и понимать данные, поступающие от беспроводного переделанного Nunchuck. После установки 14,8-вольтовой батареи LiPo столиком стало возможно управлять с помощью крошечного пульта.











Написать комментарий