
Астронавт на МКС управлял робопсом, находящимся на Земле
В январе на Международной космической станции прошёл эксперимент, в рамках которого астронавт Маркус Вандт удалённо управлял робопсом Бертом, который находился в лаборатории на Земле. В перспективе четвероногих роботов планируется использовать для исследования труднодоступных участков Луны, Марса и других планет, которые будет посещать человечество.
«До сих пор астронавты дистанционно из космоса управляли только колёсными роботами, — пишут представители Немецкого центра авиации и космонавтики (DLR). — Однако в этом эксперименте Берт освоил несколько типов походки, а в будущем передвижение с помощью лап позволит ему исследовать пересечённую местность, включая небольшие пещеры, до которых не могут добраться его оборудованные колёсами товарищи».
Вандт «позволил своему четвероногому другу самостоятельно исследовать окрестности лаборатории, наблюдая за местностью через камеру». Задачей Берта было заменить трубку одного из научных приборов. В выполнении ему помогал колёсный робот Роллин Джастин.

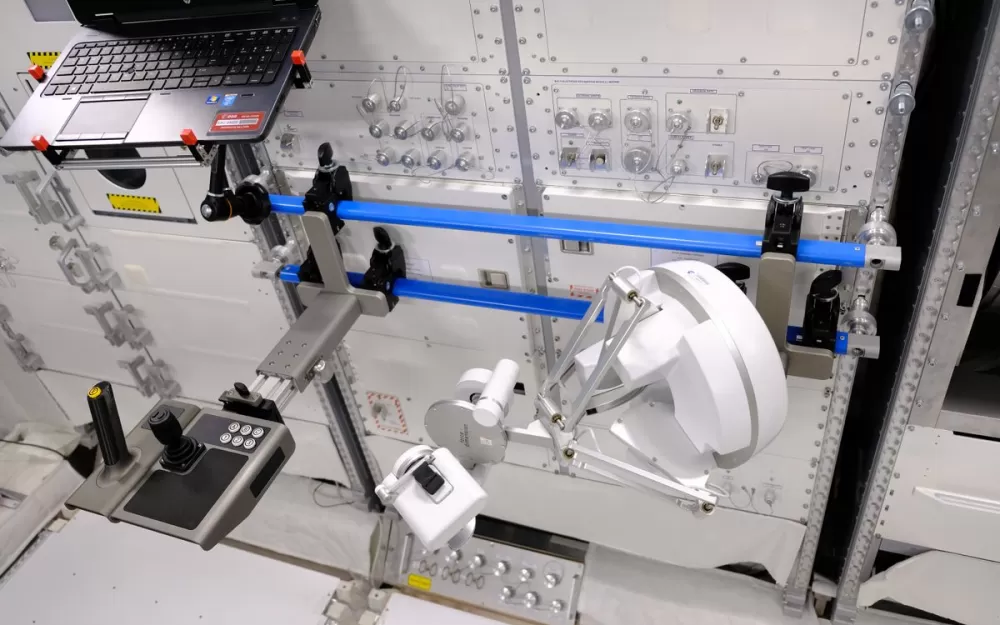
Роботы, предназначенные для экспериментов, находятся в Немецком аэрокосмическом центре в Оберпфаффенхофене, к западу от Мюнхена, и эксплуатируются в рамках проекта Surface Avatar, которым совместно управляют DLR и Европейское космическое агентство. Командный терминал роботов на МКС расположен в модуле «Коламбус» Международной космической станции. Помимо ноутбука, роботами можно управлять через джойстик и устройство взаимодействия, которое заставляет роботов копировать движения руки астронавта.













Написать комментарий